Part of our Leverage Ratios guide
What is Gearing Ratio?
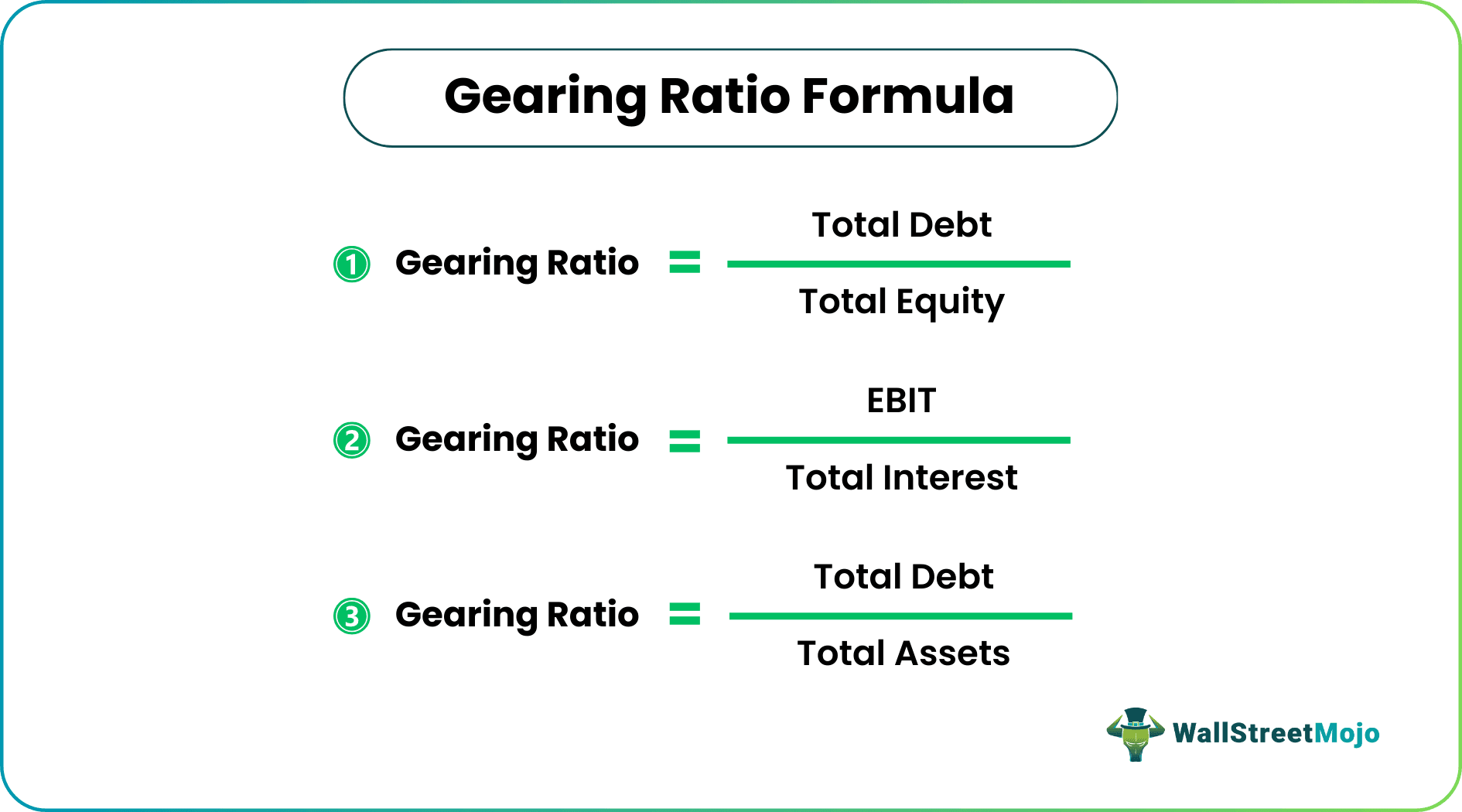
Financial analysts commonly use the gearing ratio to understand the company’s overall capital structure by dividing total debt into total equity. The higher ratio, the higher the chances of default. Thus, hindering growth is more of a hindrance to the company’s development. In addition, there are other formulas where the owner’s capital or equity compare against the long-term or short-term debt
Key Takeaways
- The gearing ratio, or leverage ratio, is a financial metric that measures the proportion of a company’s debt to its equity.
- Moreover, other formulas allow the owner’s capital or equity to compare against long-term or short-term debt.
- Financial institutions and creditors primarily prefer to utilize the gearing ratios as they are concerned with the firm’s repayment capacity. Accordingly, they prepare the proposed loan terms and conditions of the proposed loan.
- In addition, internal management uses ratios to determine future profit and cash flows.
Calculation Examples of Gearing Ratio Formula
Let us see some simple to advanced practical examples to understand it better.
Example #1
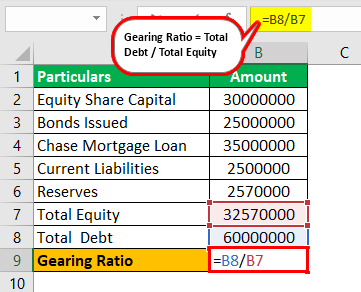
Huston Inc. reports the following numbers to the bank. First, calculate the gearing ratio using the Debt-to-equity ratio.
- Equity share capital: $30,000,000
- Bonds issued: $25,000,000
- Chase mortgage loan: $35,000,000
- Current liabilities: $2,500,000
- Reserves: $2,570,000
Solution:
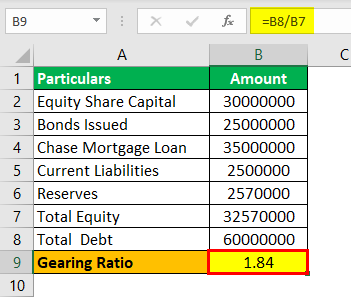
We will first calculate the company’s total debt and equity and then use the above equation.
One can do the calculation of the gearing ratio as follows: –
So this will be: –
Example #2
ABC has been recently hit by the competition and is looking for a loan from the bank. However, the bank has decided that its gearing ratio should be more than 4. Otherwise, ABC will be forced to either provide a guarantor or mortgage any property.
Based on the following details, you need to assess whether ABC meets the bank’s expectation of gearing ratio.
- Revenue from operations: $1,050,000
- Other income: $200,000
- Total revenue: $1,250,000
- Cost of goods sold: $682,500
- Depreciation: $200,000
- Operating expenses: $105,000
- Interest expenses: $70,000
- Tax expenses: $57,750
- Total expenses: $1,115,250
- Net profit: $134,750
Solution:
We will first calculate the total interest and EBIT of the company and then use the above equation.
Calculation of gearing ratio can be done as follows: –

So this will be: –
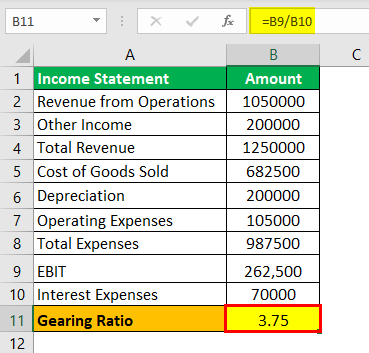
Hence, the ratio will be 3.75. Since this is less than 4 and does not meet the bank’s expected ratio, it will now have to provide a guarantor or mortgage of the property as stipulated.
Note: For calculating operating income, other income is avoided, but since we do not have any additional details about where it earns, we presume it to be part of operating income.
Example #3
Mr. Raj is a major shareholder of XYZ Co. and wants to conduct a financial health check-up. During their last annual general meeting, the board took approval from shareholders to raise $300,000 more debt external as unsecured. Mr. Raj wants to ensure that the total debt should not be more than 50% of the total assets. You are required to calculate the gearing ratio based on the below information: –

Solution:
We will first calculate the company’s total debt and then use the above equation.
Calculation of gearing ratio can be done as follows: –

So this will be: –
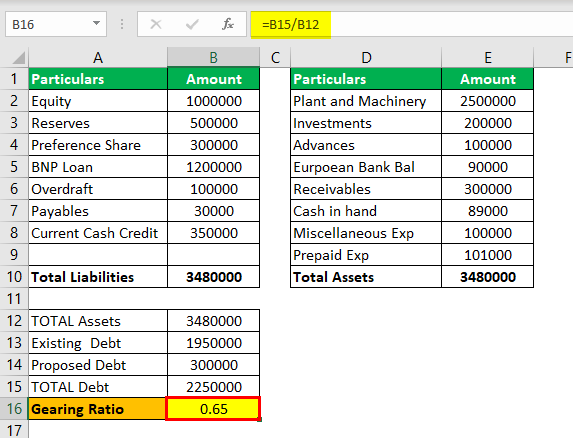
Therefore, the ratio will be 0.65. Hence, Mr. Raj’s concern is correct, as the firm could end up with the proposed loan for more than 50% of the total assets.
Relevance and Uses
Financial institutions and creditors primarily use gearing ratios as they are concerned with the repayment capacity of the firm. Accordingly, they can draft the terms and conditions of the proposed loan. Internal management also uses these ratios to analyze their future profit and cash flows. Usually, where high investment is involved, gearing ratios tend to be higher as they have to afford those. Financial institutions and creditors primarily use gearing ratios as they are concerned with the repayment capacity of the firm. Accordingly, they can draft the terms and conditions of the proposed loan. Internal management also uses these ratios to analyze their future profit and cash flows. Usually, where high investment is involved, gearing ratios tend to be higher as they have to afford those CapEx via externally secured fundings.
Frequently Asked Questions (FAQs)
Can gearing ratios be negative?
No, gearing ratios cannot be negative. A positive gearing ratio indicates that the company has more debt than equity, implying higher financial leverage. A gearing ratio of 0% means the company has no obligation and is entirely funded by equity. However, a negative gearing ratio would imply that the company has negative debt or negative equity, which is not a practical or meaningful concept in financial analysis.
What is the capital gearing ratio formula?
Capital gearing means a company’s debt ratio relative to equities. It displays the company’s financial risk. In addition, it is also known as financial gearing or financial leverage.
How do gearing ratios work?
A gearing ratio is a financial ratio that compares some owner equity (or capital) form to funds lent by the company. One can also calculate net gearing by dividing the total debt by the shareholders’ equity.
How to find the gearing ratio?
The most common approach for estimating the gearing ratio is utilizing the debt-to-equity ratio, i.e., a company’s debt divided by its shareholders’ equity. In addition, it is calculated by subtracting a company’s total liabilities from its total assets.
Recommended Articles
This article is a guide to Gearing Ratio Formula. Here, we discuss the calculation of gearing ratio, examples, and a downloadable Excel template. You can learn more about financial analysis from the following articles: –